Связаться с нами
- Продукты
- Служба поддержки
- Решение
- О нас
- Новости
- Связаться с нами
Просмотры:56 Автор:омега Время публикации: 2017-08-16 Происхождение:omega










До того, как нагрузочные ячейки на основе деформации стали методом выбора для промышленного взвешивания, широко использовались шкалы механических рычагов. Механические масштабы могут взвесить все, от таблеток до железнодорожных автомобилей и могут делать это точно и надежно, если они должным образом откалиброваны и поддерживаются. Метод работы может включать либо использование механизма балансировки веса, либо обнаружение силы, разработанной механическими рычагами. Самые ранние, до деформации датчики силовой силы включали гидравлические и пневматические конструкции. В 1843 году английский физик сэр Чарльз Уитстоун разработал мостовую схему, которая может измерить электрические сопротивления. Схема моста Уитстоуна идеально подходит для измерения изменений сопротивления, которые происходят в датчиках деформации. Хотя в 1940 -х годах был разработан первый жених деформационной проводной проволочной сопротивления, только когда современная электроника не догнала, что новая технология стала технически и экономически осуществимой. С тех пор, однако, деформационные категории пролиферировали как компоненты механического масштаба, так и в автономных нагрузочных клетках.
Конструкции нагрузочных ячеек можно различить в зависимости от типа сгенерированного выходного сигнала (пневматический, гидравлический, электрический) или в соответствии с тем, как они обнаруживают вес (изгиб, сдвиг, сжатие, натяжение и т. Д.)
Гидравлические нагрузочные ячейки представляют собой устройства с силовым вариантом, измеряя вес как изменение давления внутренней заполнительной жидкости. В типе катящейся диафрагмы Гидравлический лоад ячейка, Нагрузка или сила, действующая на загрузочную головку, переносятся в поршень, который, в свою очередь, сжимает заполнительную жидкость, ограниченную в камере эластомерной диафрагмы. По мере увеличения силы давление гидравлической жидкости возрастает. Это давление может быть локально обозначено или передано для удаленного индикации или контроля. Выход линейный и относительно не затронут количеством заполнительной жидкости или по ее температуре. Если нагрузочные ячейки были должным образом установлены и калиброваны, точность может находиться в пределах 0,25% полной или лучше, приемлемой для большинства применений для взвешивания процессов. Поскольку этот датчик не имеет электрических компонентов, он идеально подходит для использования в опасных областях. Типичные применения гидравлических нагрузочных ячейков включают в себя резервуар, бункер и бункер. Для максимальной точности веса резервуара должен быть получен путем размещения одной нагрузочной ячейки в каждой точке поддержки и суммирования их выходов.
Пневматический нагрузочные ячейки Также работают на принципе силового баланса. Эти устройства используют несколько камер демпфирования, чтобы обеспечить более высокую точность, чем гидравлическое устройство. В некоторых конструкциях первая камера демпфирования используется в качестве весовой камеры. Пневматические нагрузочные ячейки часто используются для измерения относительно небольших весов в отраслях, где чистота и безопасность вызывают особую озабоченность. Преимущества этого типа нагрузочной ячейки включают в себя их изначально доказательство взрыва и нечувствительные к изменению температуры. Кроме того, они не содержат жидкостей, которые могут загрязнять процесс, если разорваны диафрагмы. Недостатки включают относительно медленную скорость ответа и необходимость в чистом, сухом, регулируемом воздухе или азоте.
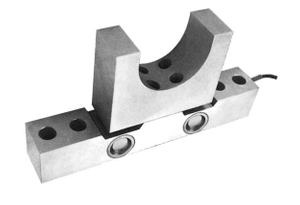
Деформация нагрузочные ячейки Преобразуйте нагрузку, действующую на них в электрические сигналы. Сами датчики связаны с пучком или структурным элементом, который деформируется при применении веса. В большинстве случаев для получения максимальной чувствительности и температурной компенсации используются четыре жениха. Два датчика обычно находятся в напряжении и два в сжатии и подключены к корректировке компенсации. Когда применяется вес, деформация изменяет электрическое сопротивление датчиков пропорционально нагрузке. Другие нагрузочные ячейки исчезают в безвестности, так как ячейки нагрузки на деформациях продолжают повышать свою точность и снижать их единичные затраты.